


浙江大学海洋学院贺治国焦鹏程团队荣获2025年金砖国家发明展特许金奖
近日,第二届金砖国家发明展获奖成果揭晓,浙江大学海洋学院科研团队的3项成果分别荣获特许金奖、金奖、银奖。

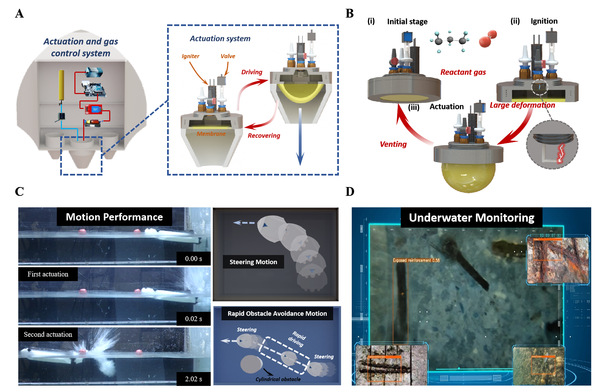
贺治国教授、焦鹏程长聘副教授和直博生马洪宽团队成果“Agile Underwater Monitoring Robots by Continuous Detonation Transient Driven Method(连续爆震瞬变速驱动水下智能监测机器人)”荣获最高奖项——特许金奖。这是项目团队继2024年第11 届阿卜杜拉阿齐兹亲王国际水奖PSIPW创新奖之后,荣获的第二项国际顶级展会大奖。


梅德庆教授、陈正教授团队成果“可持续式水下电液作动器”(Sustainable subsea electro-hydraulic actuator with compact design)、“灵巧型五功能水下电动机械臂”(OceanLite Arm: Dexterous 5-DOF Underwater Electric Manipulator with Multiple Operating Modes)两项创新性水下装备成果分获金奖和银奖。
水下连续爆震瞬变速驱动智能装备
传统水下机器人在复杂狭窄水域中存在响应速度慢、机动性差、识别精度低等瓶颈,难以满足海洋工程群高精度监测预警需求。贺治国焦鹏程团队经过系统性研究,在国际上首次研发出水下连续爆震瞬变速驱动技术。该技术通过智能控制系统高效调节耦合化学放能反应腔室,运用时序协同控制实现持续供能与连续驱动,水下瞬时运动速度达8倍身长/秒(目前国际最高速度记录),突破了制约水下机器人高效驱动与高机动性的技术瓶颈,通过融合多传感器智能协同与自平衡控制技术,实现了复杂海况下连续快速响应与多突发情况自主应对,成功应用于水下观测和重大海洋工程监测预警,得到国际国内同行的高度认可。
“可持续式水下电液作动器”项目提出了一种集泵阀缸及驱控系统为一体的作动系统,它采用高度集成的设计理念,无需布设油管,大大提高了系统可靠性,显著减少对能源的消耗以及环境的影响。该技术在水下线缆切割和深海抓斗等装备上开展试验性应用,为水下资源开发与作业等设备的驱动提供新型的解决方案;“灵巧型五功能水下电动机械臂”项目设计了一款高精度、轻量型、强交互的五功能水下电动机械臂,其具有包括视觉伺服以及沉浸式遥操作在内的多种作业方式,为水下设施的智能运维等精细作业任务提供技术支撑。这两个获奖项目分别是团队牵头承担的国家重点研发计划“深海水下电液作动器研制与应用示范”和浙江省尖兵计划“面向海底管道运维巡检的多机协同机器人装备及其示范应用”的阶段性研究成果。
金砖国家发明展是国际发明者协会联合会(IFIA)主办的高水平创新成果展示平台。本届展览共吸引来自中国、俄罗斯、巴西、印度等多个国家近200项科技创新项目参与角逐,涵盖能源、环境、机器人、医疗、海洋工程等前沿领域。
(马洪宽 刘佳佳 李文文)
电话:0580-2092277(党政办) 2092576(本科咨询)
邮编:316021 传真:0580-2092891
© 2019 浙江大学海洋学院版权所有 技术支持:Yoncc