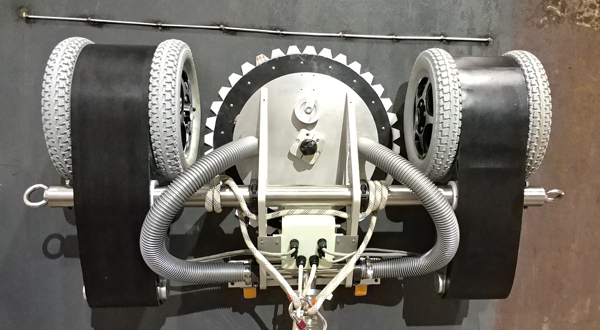
日前,由浙大海洋学院海洋电子与智能系统研究所朱世强教授团队研制的除锈爬壁机器人,在位于舟山长涂岛的金海船务公司正式交付使用。据团队技术骨干宋伟博士介绍,这台除锈爬壁机器人具有废水自回收功能,作业效率可超过80平方米/小时。

生锈和海生物附着是远洋船舶面临的常见问题,为保证船舶的良好工作状态,需要定期清除船板上的铁锈、废旧油漆、附着海生物等。传统的人工清除属于典型的劳动密集型作业,安全系数低、人工成本高,还因喷砂作业极易造成对海洋环境的污染和人身健康的危害。
朱世强团队具有10多年特种机器人和流体动力技术的研究积累,2年前受在舟船舶企业的委托,开始除锈爬壁机器人的研制。“爬壁机器人在船表面的吸附原理比较简单,但实际应用却要面临十分复杂的情况。”宋伟介绍,不同的船型,不同的焊接与涂装工艺,海水对船体油漆的冲刷程度,都会影响爬壁机器人的工作性能。“在研究过程中我们就碰到,有的船体油漆又硬又滑,像玻璃钢一样,机器人很难吸附在上面;有的船体焊缝做得很高,一不小心就会卡住。”
历经长达2年、4代机型的测试和实船试验,团队先后突破了单面强吸附永磁组件设计、大负载爬壁机器人轻量化设计、超高压水射流喷嘴空间分布优化、曲面自适应真空废水回收等关键技术。“我们利用超过200兆帕斯卡的超高压水射流除锈(油漆),并利用真空负压同步将废水从船板表面抽到收集设备,从而避免含有铁锈和旧油漆的废水直接流到大海中而造成污染。”宋伟介绍说,人工除锈,一般是6平方米/小时,在满足SA2.5除锈等级的要求下,这台机器人的最大作业效率可达81平方米/小时、平均作业效率为40平方米/小时。

据了解,除了船舶,该款机器人还可以用于石化储罐的壁面维护。舟山是我国重要的船舶修造基地和石化储运基地,随着相关原油储备基地建成,这款除锈爬壁机器人无疑会大有用武之地。
“在很好地支撑舟山当地产业的同时,也将在实际应用中积累更多经验,得到快速地升级成长。”宋伟介绍,团队研制的更大负载能力、更高作业效率的机型已在样机装配阶段,水陆两栖机型将在今年底完成样机研制。依托浙江大学多学科优势,基于多传感器信息融合的爬壁机器人智能作业研究也已开展。
(文 高宗文/摄影 宋伟)




